
Robot gantry nwere etiti kọlụm, akụkụ X-axis, akụrụngwa Y-axis, akụrụngwa Z-axis, ihe ndozi na igbe njikwa.
Ọ bụ akụrụngwa mmepụta ihe zuru oke na-adabere na akụkụ anọ X, Y, Z usoro nhazi akụkụ atọ, nke nwere ike ịhazigharị ọnọdụ ọrụ ma ọ bụ ghọta trajectory ije nke workpiece. A na-emejuputa isi njikwa ya site na ndị na-ahụ maka ụlọ ọrụ mmepụta ihe.
Onye na-ahụ maka ya na-enyocha ma na-ahazi akara ntinye dị iche iche, na-eme mkpebi ezi uche dị na ya, wee nye iwu mmezu iwu na mpaghara mmepụta ọ bụla iji mezue nkwonkwo nkwonkwo n'etiti X, Y, na Z axes wee ghọta usoro ọrụ zuru oke nke zuru oke.
A na-eji ya na mgbakọ ngwaahịa na njem njem, sistemu ebufe, na ebe ọrụ na-enweghị onye. Enwere ike iji ya dị ka ngwa ihe dị mkpa dị n'akụkụ maka nchekwa nwa oge na ngwa ngwa ma nwee ike ijikwa ngwa ngwa ngwa ngwa maka iji dị mfe. Ngwa Industries abuana ke : ikpeazụ mgbakọ, sub-mgbakọ, nhazi, ule, debugging na njem nke ngwaahịa na otú nwa nwoke.
Njirimara ngwaahịa bụ iji nyere ndị ahịa aka idozi nsogbu nke obere arụmọrụ ma ọ bụ ihe egwu dị elu na ụdị njikwa ihe dị iche iche, ka ọ dị mfe na ngwa ngwa belata ihe egwu njikwa, chekwaa oge, mbọ, chekwaa ọrụ na ọbụna dochie ọrụ.
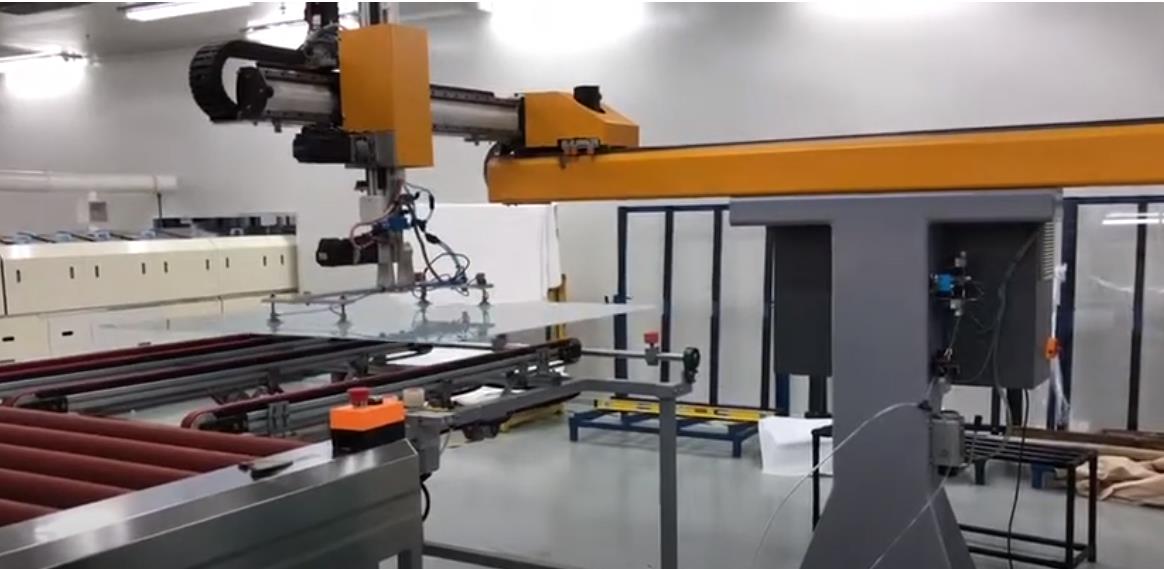
 Ngwa a na-eji gantry truss manipulator maka iko gụnyere kọlụm na obe etinyere na kọlụm. A na-eji okporo ụzọ mmịfe arụnyere n'obe obe. A na-eji ngwaọrụ ntụgharị ntụgharị arụnyere okporo ụzọ slide ahụ. Ejiri ngwaọrụ sliding vetikal yana ngwaọrụ iko mmiri pneumatic tinye. Enwere ike mezuo usoro njem njem na-aga n'otu ebe dị n'akụkụ atọ, na-amịpụta iko ahụ site na iko mmiri, buru ụzọ gaa n'akụkụ axis X, wee tụgharịa ogo 90 gaa n'ọnọdụ a họpụtara, wee bulie elu. na ala na axis Y. Mgbe ị rutere ebe a na-edozi, hapụ iko ma tinye ya na shelf iko. Nkwụsi ike nhazi nke ngwaọrụ niile dị oke elu, nke na-eme ka njikwa dị mma. arụmọrụ.
Ngwa a na-eji gantry truss manipulator maka iko gụnyere kọlụm na obe etinyere na kọlụm. A na-eji okporo ụzọ mmịfe arụnyere n'obe obe. A na-eji ngwaọrụ ntụgharị ntụgharị arụnyere okporo ụzọ slide ahụ. Ejiri ngwaọrụ sliding vetikal yana ngwaọrụ iko mmiri pneumatic tinye. Enwere ike mezuo usoro njem njem na-aga n'otu ebe dị n'akụkụ atọ, na-amịpụta iko ahụ site na iko mmiri, buru ụzọ gaa n'akụkụ axis X, wee tụgharịa ogo 90 gaa n'ọnọdụ a họpụtara, wee bulie elu. na ala na axis Y. Mgbe ị rutere ebe a na-edozi, hapụ iko ma tinye ya na shelf iko. Nkwụsi ike nhazi nke ngwaọrụ niile dị oke elu, nke na-eme ka njikwa dị mma. arụmọrụ.

Oge nzipu: Mar-18-2024



